
Johdanto: Taianomainen ajatus puettavasta teknologiasta
Oletteko koskaan pysähtyneet miettimään, miltä tuntuisi, jos vaatteillanne, laukuillanne tai asusteillanne olisi oma tahto? Jos lempipiponne voisi vilkuttaa valoja, kun lähestytte kotia? Tai jos takkinne hiha voisi värähdellä, kun puhelimeenne tulee tärkeä viesti? Tervetuloa puettavan teknologian maailmaan, jossa elektroniikka ei ole enää suljettu mustiin muovilaatikoihin, vaan siitä tulee osa elämäämme, suoraan pukeutumiseemme ommeltuna. Tämä ei ole enää scifiä, vaan todellisuutta, ja sen yksi tärkeimmistä avaimista on pieni, pyöreä piirilevy nimeltä LilyPad Arduino.
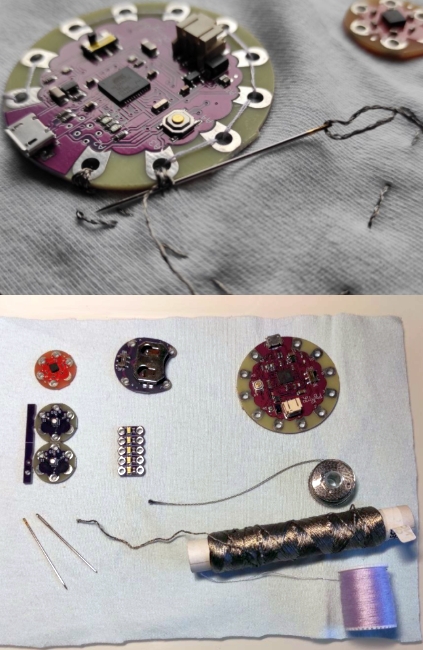
Mikä tekee LilyPadista niin ainutlaatuisen?
LilyPad Arduino on suunniteltu erityisesti e-tekstiilejä ja puettavia laitteita varten. Se on enemmän kuin pelkkä mikrokontrolleri – se on kokonainen järjestelmä ommeltavia, elektronisia komponentteja, jotka on luotu auttamaan pehmeiden, interaktiivisten projektien rakentamisessa. Perinteisissä elektroniikkaprojekteissa komponentit juotetaan kiinni piirilevyyn, mikä voi tuntua monimutkaiselta ja tekniseltä. LilyPad tekee tästä prosessista poikkeuksellisen helppoa: se on pyöreäreunainen, jotta se ei tartu kankaaseen tai katko lankaa, ja sen komponenteissa on suuret, johtavat liitoskohdat (sew tabs), joiden ansiosta ne voidaan ommella kiinni kankaaseen johtavalla langalla. Tämä johtava lanka korvaa perinteiset johdot.
Koko järjestelmä toimii harmonisena kokonaisuutena, jossa virta kulkee paristosta johtavan langan kautta erilaisiin LilyPad-komponentteihin, kuten LED-valoihin, antureihin ja kaiuttimiin. Tällä tavoin voidaan luoda interaktiivisia ja eläviä luomuksia. Esimerkkejä, jotka herättävät luovuuden, ovat vaikkapa valaistu reppu, hehkuva rintaneula tai asu, joka valaistuu sen havaitessa ääntä. On jopa mahdollista rakentaa huppari, jossa on MP3-soitin, tai pehmolelu, joka tärisee.
LilyPad Arduino on syvemmin katsottuna fyysinen symboli teknologian demokratisoimisesta. Se ei ole vain uusi mikrokontrolleri, vaan se madaltaa fyysistä kynnystä elektroniikan parissa työskentelyyn. Se korvaa perinteisen, usein pelottavan juottamisen tai piirilevyjen suunnittelun ompelulla, joka on monille tuttu taito. Tämä yhdistelmä tekee elektroniikasta helpommin lähestyttävää käsityön tai kuitutaiteiden näkökulmasta. Sen ansiosta se lisää monimutkaisten ja abstraktien käsitteiden ymmärtämistä ja edistää opiskelijoiden kiinnostusta tietotekniikkaan. Yhtäkkiä teknisestä harrastuksesta tulee luova ja saavutettava projekti kaikille, tekniikan opiskelijoista käsityöläisiin.
Koodin taika – ja sen kynnys
Kun fyysinen kynnys on ylitetty, on aika astua koodin maailmaan. Arduinoa ohjelmoidaan C-pohjaisella kielellä, jolla annetaan mikrokontrollerille käskyjä. Ensimmäinen askel useimmille on klassinen
Blink-ohjelma, joka saa LED-valon vilkkumaan. Tämän yksinkertaisen esimerkin kautta opitaan ohjelman perusrakenne, joka koostuu kahdesta pääfunktiosta:
void setup() (joka suoritetaan kerran) ja void loop() (joka toistaa toimintoja jatkuvasti).
Vaikka LilyPad tekee fyysisestä rakentamisesta intuitiivista, koodin kirjoittaminen ja virheiden etsiminen voi silti olla vaikeaa ja pelottavaa aloittelijoille. Kaksi erillistä kynnystä erottuvat toisistaan: LilyPad on jo onnistuneesti madaltanut
fyysisen kynnyksen, mutta ohjelmoinnin kynnys on säilynyt. Tämä luo pullonkaulan, jossa luovat ideat voivat kuolla toteutuksen puutteeseen. Aineisto osoittaa, että perinteisessä prosessissa ohjelmoijien piti jatkuvasti vaihtaa erilaisten työkalujen ja dokumentaation välillä, mikä hidasti työnkulkua. Tehtävän aloittaminen on varsinkin haastavaa, ja koodin kirjoittaminen vaatii perusteellista ymmärrystä kielestä. Käsityön taitaja saattaa innostua fyysisestä puolesta, mutta lannistuu, kun edessä on ohjelmointi-ikkuna.
Tässä kohdassa tekoäly astuu kuvaan. Se ei ole vain “kiva lisä”, vaan se on ratkaisu tähän toiseen, kriittiseen esteeseen. Se on täydentävä teknologia, joka mahdollistaa LilyPadin alkuperäisen vision toteutumisen kokonaisuudessaan: puettavien laitteiden luominen on vihdoin saavutettavissa kaikille, koodauskokemuksesta riippumatta.
Tekoäly: Ohjelmoijan uusi paras kaveri
Tekoäly on tullut tietokoneohjelmien kehittäjien avuksi viimeisen kahden vuoden aikana. Sen tehtävänä on demokratisoida teknologiaa ja tehdä siitä entistä helpommin lähestyttävää. Tekoäly voi toimia monissa rooleissa koodausprosessin aikana: se voi selittää koodia, paikantaa virheitä, pilkkoa tehtäviä pienemmiksi ja jopa muuntaa koodia kielestä toiseen.
Tekoäly muuttaa koodausprosessin perusteellisesti. Perinteisessä mallissa ohjelmoijan rooli on yksityiskohtien hallinta ja suora ohjelmointi. Jokaista riviä ja syntaksia on hallittava itse. Generatiivisen tekoälyn avulla on kuitenkin mahdollista tuottaa ohjelmakoodia pelkästään kuvailemalla, miten sen pitäisi toimia. Tämä on syvä, toisen asteen muutos: luojan päätehtäväksi tulee vision ja toiminnallisuuden selkeä artikulointi, ei sen tekninen toteuttaminen. Tämä vapauttaa koodaajan aikaa korkean tason suunnitteluun ja luovaan ongelmanratkaisuun, kun tekoäly hoitaa rutiininomaisen ja syntaksikeskeisen työn.
Seuraava taulukko havainnollistaa, kuinka perinteinen koodausprosessi muuttuu tekoälyn avustamana:
Tekoälyn roolit koodausprosessissa
| Perinteisen koodauksen vaihe | Tekoälyavusteinen prosessi |
| Ideointi ja suunnittelu: Koodaaja miettii toiminnallisuutta ja koodin rakennetta. | Anna kuvaus: Annetaan tekoälylle kuvaus halutusta toiminnallisuudesta luonnollisella kielellä (esim. “Ohjelmoi LilyPad vilkuttamaan LEDiä, kun kiihtyvyysanturi havaitsee liikettä.”). |
| Koodin kirjoittaminen: Koodaaja kirjoittaa koodin rivi riviltä muistaen syntaksin ja funktiot. | Tekoäly luo luonnoksen: Tekoäly luo koodin luonnoksen tai koko koodin kuvauksen perusteella. |
| Debuggaus ja virheiden etsintä: Koodaaja etsii virheitä käsin tai tulostuksien avulla. | Syötä virheilmoitus: Syötä virheilmoitus tekoälylle, joka auttaa paikantamaan ja korjaamaan virheen. |
| Optimointi ja dokumentointi: Koodaaja optimoi koodia ja lisää kommentit manuaalisesti. | Pyydä tekoälyä selittämään: Pyydä tekoälyä selittämään koodia, lisäämään kommentteja tai muuttamaan koodin luettavammaksi. |
Elli esittelee: Tekoälyn apuvälineet työpajassa
Tekoälyä hyödyntäviä työkaluja on nykyään monia. Yleiskäyttöiset tekoäly-chatbotit, kuten Google Gemini, voivat tuottaa ohjelmakoodia pelkästään toimintaa kuvailemalla. Myös koodieditoreihin integroidut työkalut, kuten GitHub Copilot, tarjoavat reaaliaikaista apua.
On olemassa myös Arduinoon erikoistuneita tekoälytyökaluja, kuten duinocodegenerator.com. Tällaisen sivuston avulla käyttäjä voi syöttää kuvauksen luonnollisella kielellä, ja se generoi vastaavan koodin. Vaikka tällaiset työkalut ovat tehokkaita, niiden hyödyntäminen vaatii taitoa. Työkalut painottavat hyvän kehotteen (prompt) merkitystä, eli ohjeiden on oltava tarkkoja ja yksityiskohtaisia, jotta lopputulos on luotettava. Tämän takia on elintärkeää opetella, kuinka pyytää apua tekoälyltä oikein.
Seuraava taulukko havainnollistaa, kuinka kehotteen laatu vaikuttaa lopputulokseen:
Hyvät vs. Huonot kehotteet
| Huono esimerkki | Ongelma | Hyvä esimerkki |
| “ohjelmoi robotti siivoamaan huoneeni” | Liian epämääräinen ja ei sovellu Arduinolle. | “ohjelmoi LilyPad Arduino Uno lukemaan lämpötila-anturin (DS18B20) ja näyttämään lämpötilan Celsius-asteina LCD-näytöllä (DFR0063)”. |
| “tarvitsen koodin valoille” | Liian yksinkertainen. Valojen toiminta, tyyppi ja liitännät puuttuvat. | “tee koodi, joka saa LilyPad RGB LED:n vaihtamaan väriä sekunnin välein punaisesta vihreään ja siniseen. Käytä R9, G10 ja B11-pinnejä.” |
| “koodaa liiketunnistin” | Tarvitsee enemmän yksityiskohtia. Mikä anturi? Miten koodin tulisi reagoida liiketunnistimeen? | “ohjelmoi liiketunnistin (PIR), joka on kytketty pinniin 2, sytyttämään LilyPad LED-valon, joka on kytketty pinniin 5, 10 sekunniksi, kun se havaitsee liikettä” |
Tämä taulukko paljastaa ihmisen ja tekoälyn välisen kommunikaation todellisen luonteen. Vaikka tekoäly on fiksu, se on silti vain työkalu, joka vaatii tarkan ohjeistuksen. Huono, epämääräinen kehotus johtaa huonoon tai epäonnistuneeseen tulokseen, kun taas tarkka, yksityiskohtainen kuvaus tuottaa laadukkaan ja toimivan koodin. Tämä korostaa sitä, että ihmisen rooli luovana visionäärinä ja ongelmanratkaisijana on edelleen keskeinen.
Avoin mieli, kriittinen silmä: Tekoäly ei ole taikuri
On tärkeää pitää mielessä, että vaikka tekoäly on tehokas apuri, se ei ole erehtymätön. Tekoäly voi tuottaa “hallusinaatioita” eli loogisesti virheellisiä tai täysin käsittämättömiä vastauksia. Kuten eräs artikkeli huomauttaa, ChatGPT:n kaltaiset mallit eivät välttämättä ole koulutettu virallisilla Arduino-resursseilla, minkä takia niiden vastaukset voivat olla vanhentuneita, epätarkkoja tai yksinkertaisesti vääriä.
Tekoälytyökalut siirtävät vastuun, mutta eivät poista sitä. Vaikka koodin kirjoittaminen nopeutuu, kriittisen ajattelun ja koodin ymmärtämisen tarve ei katoa. Se muuttaa muotoaan. Aineisto korostaa, että tekoälyn tuottamassa koodissa voi olla “syntaksivirheitä, logiikkavirheitä, tietoturvavirheitä”. Tämän vuoksi käyttäjän on edelleen oltava riittävän perehtynyt aiheeseen, jotta hän voi tunnistaa nämä ongelmat ja varmistaa, että tuotettu koodi on turvallista ja toimivaa. Ihmisen rooli siirtyy koodin
kirjoittamisesta koodin auditoinnin ja validoinnin asiantuntijaksi. Luovan tekijän on opittava kriittinen silmä, jotta hän voi erottaa toimivan ja turvallisen koodin ongelmallisesta.
LilyPad + Tekoäly = Rajoittamaton luovuus
Yhdistämällä LilyPadin vision ja tekoälyn kyvyt, emme vain tee vanhaa asiaa nopeammin, vaan avoimessa mielessä luomme kokonaan uuden, laajemman tekijäyhteisön, jossa luovuus ei ole enää teknisten taitojen rajoittamaa. LilyPad tekee elektroniikan fysiikasta saavutettavaa, ja tekoäly tekee koodin kirjoittamisesta puheenomaista ja lähestyttävää. Tämä täydellinen pari laskee sekä fyysistä että henkistä kynnystä, mahdollistaen kenen tahansa luoda jotain ainutlaatuista.
Teknologian tulevaisuus on täynnä mahdollisuuksia, kun luovuus on ainoa rajoite. Nyt on täydellinen hetki tarttua johtavaan lankaan, avata koodieditori ja pyytää tekoälyä apuun. Vain mielikuvituksemme asettaa rajat sille, mitä voimme luoda seuraavaksi.
LilyPad Arduino Wearable -projektit
Sydämensyke-Valokuvio: Tunteita Kankaaseen
Visio: Paita, joka heijastaa sisäistä elämäämäsi – sydämensyke muuttuu hypnoottiseksi valovirraksi rintakehälläsi.
Tarvikkeet:
- LilyPad Arduino Uno
- Sykemittari-anturi (Pulse Sensor)
- 8-12 LilyPad LED-valoa
- Johtava lanka
- Paita tai toppi
// Sydämensyke-valoshow
// Elli Enigman ensimmäinen visio toteutettuna
int pulsePin = A0; // Sykeanturi
int blinkPin = 13; // Sisäänrakennettu LED
int fadePin = 5; // PWM-pinni himmennettävälle LEDille
// Muuttujat sykkeenseurantaa varten
volatile int BPM; // Sydämensyke BPM
volatile int Signal; // Raakadata anturilta
volatile int IBI = 600; // Sykeväli millisekunneissa
volatile boolean Pulse = false;
volatile boolean QS = false; // Syke havaittu
// LED-pinnet (muokkaa omasi mukaan)
int ledPins[] = {3, 5, 6, 9, 10, 11};
int numLeds = 6;
void setup() {
Serial.begin(115200);
// Alusta LED-pinnet
for(int i = 0; i < numLeds; i++) {
pinMode(ledPins[i], OUTPUT);
}
// Käynnistä keskeytys sykeanturille
interruptSetup();
}
void loop() {
// Tekoäly-kehoite: "Luo sykkeenseurannan perusteella aaltomainen valoefekti"
if (QS == true) {
// Syke havaittu - luo valoaalto
createHeartbeatWave();
QS = false;
}
// Näytä BPM sarjaportissa
if (Serial.available()) {
Serial.print("BPM: ");
Serial.println(BPM);
}
delay(20);
}
void createHeartbeatWave() {
// Luo aaltomainen valoefekti sykkeeseen
for(int brightness = 0; brightness <= 255; brightness += 5) {
for(int i = 0; i < numLeds; i++) {
// Luo viive LEDien välille aaltoefektiä varten
int delayedBrightness = brightness - (i * 40);
if(delayedBrightness < 0) delayedBrightness = 0;
analogWrite(ledPins[i], delayedBrightness);
}
delay(10);
}
// Sammuta LEDit
for(int i = 0; i < numLeds; i++) {
analogWrite(ledPins[i], 0);
}
}
void interruptSetup() {
// Sykeanturin keskeytysasetukset
// (Yksinkertaistettu versio - täydellisessä toteutuksessa tarvitaan lisää koodia)
TCCR2A = 0x02;
TCCR2B = 0x06;
OCR2A = 0X7C;
TIMSK2 = 0x02;
sei();
}
ISR(TIMER2_COMPA_vect) {
// Sykkeentunnistuslogiikka
Signal = analogRead(pulsePin);
// Yksinkertaistettu syketunnistus
if(Signal > 550) {
BPM = 1500 / IBI;
QS = true;
}
}Äänireaktiivinen Huppari: Musiikki Näkyväksi
Äänireaktiivinen Huppari: Musiikki Näkyväksi
Visio: Huppari, joka muuttuu spektakulaariseksi valonäytökseksi musiikin tahdissa. Jokainen bassolyönti, melodialinja ja harmonia heijastuu värikylläisinä valoimpulsseina.
// Musiikki-visualisoija huppariin
// "Kun musiikki kohtaa kankaan, syntyy valojen sinfonia" - Elli
int micPin = A1; // Mikrofonianturi
int ledPins[] = {3, 5, 6, 9, 10, 11, 13}; // LED-pinnet
int numLeds = 7;
int sensitivity = 50; // Herkkyys äänelle
int baseline = 0; // Taustamelu
void setup() {
Serial.begin(9600);
// Alusta LEDit
for(int i = 0; i < numLeds; i++) {
pinMode(ledPins[i], OUTPUT);
}
// Kalibroi taustamelu
calibrateMicrophone();
// Tervehdysvaloshow
startupLightShow();
}
void loop() {
// Lue äänentaso
int soundLevel = analogRead(micPin);
int volume = abs(soundLevel - baseline);
// Tekoäly-kehoite käytössä: "Muunna äänentaso visuaaliseksi spektriksi"
if(volume > sensitivity) {
// Laske kuinka monta LEDiä sytytetään
int ledsToLight = map(volume, sensitivity, 500, 1, numLeds);
// Luo väriefekti volyymin mukaan
createMusicVisualization(ledsToLight, volume);
} else {
// Hiljaisuudessa hienovarainen hengitysefekti
breathingEffect();
}
delay(50);
}
void createMusicVisualization(int numActive, int intensity) {
// Luo väriefekti volyymin perusteella
for(int i = 0; i < numActive; i++) {
// Vaihteleva kirkkaus intensiteetin mukaan
int brightness = map(intensity, 50, 500, 50, 255);
// Värivaihtelu pinnikohtaisesti (simuloi RGB:tä PWM:llä)
if(i % 3 == 0) brightness *= 0.8; // "Punainen" kanava
if(i % 3 == 1) brightness *= 1.0; // "Vihreä" kanava
if(i % 3 == 2) brightness *= 0.6; // "Sininen" kanava
analogWrite(ledPins[i], brightness);
}
// Sammuta loput LEDit
for(int i = numActive; i < numLeds; i++) {
analogWrite(ledPins[i], 0);
}
}
void breathingEffect() {
// Hiljainen hengitysefekti hiljaisuuden aikana
for(int brightness = 0; brightness <= 30; brightness++) {
analogWrite(ledPins[0], brightness);
delay(50);
}
for(int brightness = 30; brightness >= 0; brightness--) {
analogWrite(ledPins[0], brightness);
delay(50);
}
}
void calibrateMicrophone() {
// Mittaa taustamelu 3 sekunnin ajan
long total = 0;
for(int i = 0; i < 300; i++) {
total += analogRead(micPin);
delay(10);
}
baseline = total / 300;
}
void startupLightShow() {
// Käynnistysanimaatio
for(int i = 0; i < numLeds; i++) {
digitalWrite(ledPins[i], HIGH);
delay(100);
}
delay(500);
for(int i = 0; i < numLeds; i++) {
digitalWrite(ledPins[i], LOW);
delay(100);
}
}Liikuntamotivaattori-Paita: Kannustava Kuntoilukaveri
Visio: Paita, joka toimii henkilökohtaisena treenivalmentajana. Se mittaa liikettä, kannustaa tavoitteiden saavuttamiseen ja juhlii onnistumisia spektakulaarisilla valonäytöksillä.
// Liikuntamotivaattori-paita
// "Jokainen askel on voitto, jokainen liike on progress" - Elli
int stepSensor = A3; // Askelmittari (kiihtyvyysanturi)
int heartRatePin = A4; // Sykeantui
int motivationLeds[] = {3, 5, 6, 9, 10, 11}; // Motivoivat LEDit
int progressBar[] = {12, 13, 2, 4, 7, 8}; // Edistymispalkki
int celebrationPin = 1; // Juhlavalo
int buzzer = 0; // Motivoiva äänimerkki
// Tavoitteet ja seuranta
int dailyStepGoal = 10000; // Päivittäinen askellavoite
int currentSteps = 0;
int sessionsCompleted = 0;
int currentHeartRate = 0;
int targetHeartRate = 140; // Tavoitesyke
// Motivaatiotilat
enum MotivationState {
STARTING,
WARMING_UP,
IN_ZONE,
EXCEEDING,
CELEBRATING,
RESTING
};
MotivationState currentState = RESTING;
unsigned long sessionStartTime = 0;
unsigned long lastStepTime = 0;
bool workoutActive = false;
void setup() {
Serial.begin(9600);
// Alusta LEDit
for(int i = 0; i < 6; i++) {
pinMode(motivationLeds[i], OUTPUT);
pinMode(progressBar[i], OUTPUT);
}
pinMode(celebrationPin, OUTPUT);
pinMode(buzzer, OUTPUT);
// Tervehdys ja motivaatio
welcomeSequence();
Serial.println("Valmentajasi on valmis! Liikutaan yhdessä!");
}
void loop() {
// Lue anturit
readSensors();
// Tekoäly-kehoite: "Analysoi liikunta-aktiivisuus ja anna motivoivaa palautetta"
// Päätä motivaation tila
determineMotivationState();
// Toimi tilan mukaisesti
switch(currentState) {
case STARTING:
startingMotivation();
break;
case WARMING_UP:
warmUpEncouragement();
break;
case IN_ZONE:
inZoneSupport();
break;
case EXCEEDING:
exceedingCelebration();
break;
case CELEBRATING:
goalCelebration();
break;
case RESTING:
restingMode();
break;
}
// Päivitä edistymispalkki
updateProgressBar();
delay(200);
}
void readSensors() {
// Lue askellaskuri
int movement = analogRead(stepSensor);
static int lastMovement = 0;
// Yksinkertainen askeltunnistus
if(abs(movement - lastMovement) > 100) {
if(millis() - lastStepTime > 300) { // Esto kaksinkertaisille askelille
currentSteps++;
lastStepTime = millis();
if(!workoutActive) {
startWorkout();
}
}
}
lastMovement = movement;
// Lue syke (yksinkertaistettu)
int heartRateRaw = analogRead(heartRatePin);
currentHeartRate = map(heartRateRaw, 0, 1023, 60, 200);
}
void determineMotivationState() {
// Määritä tila aktiivisuuden perusteella
if(!workoutActive) {
currentState = RESTING;
} else if(currentSteps >= dailyStepGoal) {
currentState = CELEBRATING;
} else if(currentHeartRate > targetHeartRate * 1.1) {
currentState = EXCEEDING;
} else if(currentHeartRate > targetHeartRate * 0.8) {
currentState = IN_ZONE;
} else if(millis() - sessionStartTime < 120000) { // 2 min lämmittely
currentState = WARMING_UP;
} else {
currentState = STARTING;
}
}
void startingMotivation() {
// Kannusta alkuun
static unsigned long lastMotivation = 0;
if(millis() - lastMotivation > 10000) {
// Kannustava viesti 10s välein
encouragementPulse(2000, 100); // Oranssi väri (simuloitu)
playMotivationTone(800, 200);
Serial.println("Aloitetaan! Jokainen askel on voitto! 💪");
lastMotivation = millis();
}
}
void warmUpEncouragement() {
// Lämmittelyvaihe
breathingPattern(1000); // Rauhallinen hengitysrytmi
if(random(100) < 5) { // 5% todennäköisyydellä
Serial.println("Hyvä lämmittely! Syke nousee mukavasti 🔥");
playMotivationTone(1000, 300);
}
}
void inZoneSupport() {
// Optimaalinen harjoitteluvyöhyke
steadyGlow(150); // Vihreä hehku
static unsigned long lastZoneMessage = 0;
if(millis() - lastZoneMessage > 30000) {
Serial.println("Loistavaa! Olet täydellisessä rytmissä! 🎯");
celebrationFlash(3);
playMotivationTone(1200,